
1- Giới thiệu
Xác định tọa độ tâm chụp ảnh bằng phương pháp định vị GNSS xử lý sau PPK cho độ tin cậy cao vì trị đo PPK của tâm phase anten GNSS trên UAV chiếm số lượng lớn (0.2s/trị đo), phần lớn là lời giải Fixed trong khi số tọa độ tâm chụp cần tính chiếm số lượng không nhiều (chiếm khoảng 6%). Các thông số tính toán PPK được kiểm soát chặt chẽ (chỉ số ratio, lời giải Fixed, sai số trung phương sau khi giải PPK). Các ưu thế của công nghệ đo ảnh có sử dụng định vị tâm chụp bằng PPK được phát huy tối đa như: hạn chế điểm khống chế mặt đất, có thể dùng trạm cơ sở của bên thứ 3 mà không cần đồng bộ, không cần kết nối giữa trạm cơ sở và UAV, công tác bay thực địa đơn giản nhanh chóng, không bị hạn chế bởi đường truyền dẫn tín hiệu giữa trạm cơ sở cùng thiết bị điều khiển và máy bay không người lái, phạm vi hoạt động được xa hơn đặc biệt ở các vùng địa hình không thuận lợi cho việc truyền dẫn, số liệu trạm cơ sở được lưu lại làm minh chứng rõ ràng… Việc xây dựng quy trình chặt chẽ (Hình 2) giúp cho hạn chế tối thiểu các sai sót khi thao tác trên thực địa và xử lý trong phòng.
Hạn chế của phương pháp bay chụp sử dụng định vị bằng PPK là không xác định tức thời tọa độ tâm chụp ngay ở thực địa, ở thời điểm chụp ảnh một cách chính xác; Nên khi bay chụp có sử dụng mô hình số bề mặt để phục vụ bay theo dáng địa hình ở những vùng chênh cao lớn, đặc thù không nên dùng mà lúc này phải dùng phương pháp RTK với trạm cơ sở của hãng để đồng bộ, đảm bảo tính an toàn cao.
2- Nguyên lý cơ bản của phương pháp định vị PPK xác định tọa độ tâm chụp ảnh
Nguyên lý cơ bản của phương pháp định vị PPK cho tâm ảnh trên thiết bị bay không người lái bản chất là một phép đo tương đối của hệ thống định vị toàn cầu GNSS (Global Navigation Sattelite System), khi trạm cơ sở và anten trên UAV cùng thu tín hiệu GNSS trong cùng 1 thời gian. Vì tốc độ bay lúc chụp ảnh của UAV thường vào khoảng 6-8m/s nên tần suất thu tín hiệu vệ tinh cài đặt trên UAV và trạm cơ sở phục vụ cho định vị tâm chụp thường là 5Hz (tức 0.2s thu 1 lần tất cả các hệ thống vệ tinh mà đầu thu có khả năng thu như GPS, Beidu, Galileo, Glonass…) để phục vụ nội suy tọa độ tâm ảnh chính xác hơn ở thời điểm chụp ảnh. Việc xử lý tính toán tọa độ tâm ảnh ở phương pháp định vị động PPK được tiến hành trong phòng trên máy tính với phần mềm mã nguồn mở RTKLIB ở mô đun RTKPOST (Tomoji Takasu and support, 2013).
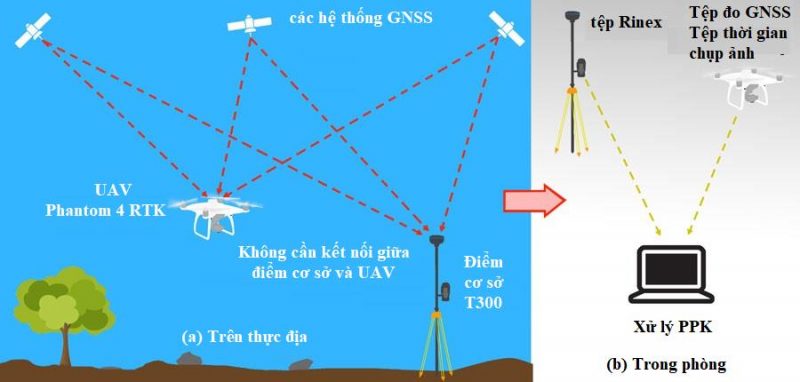
Hình 1. Phương pháp định vị tâm chụp PPK cho tâm chụp ảnh (nguồn: Escadrone.com, 2020)
3- Quy trình công nghệ
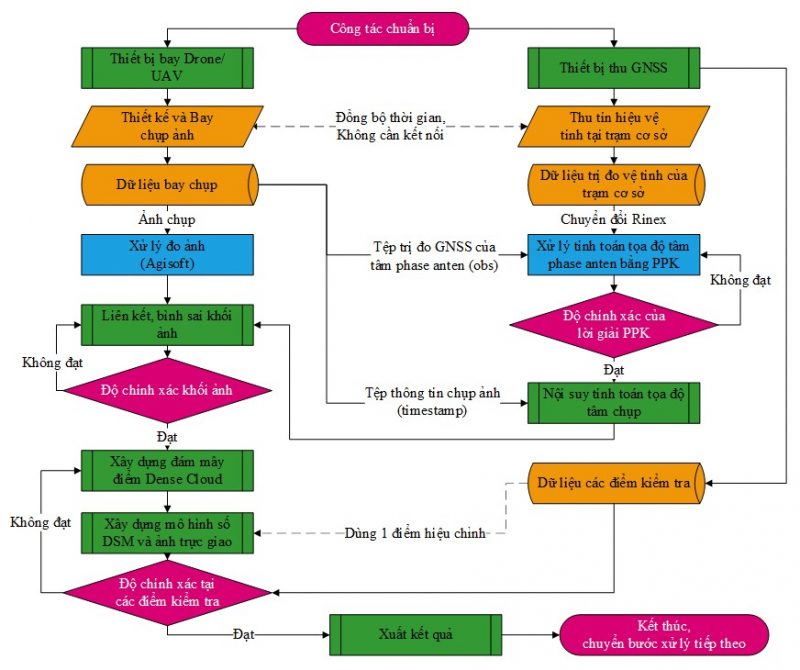
Hình 2. Quy trình công nghệ sử dụng định vị tâm chụp PPK trong đo ảnh UAV
Trong quy trình ở hình 2 cần chú ý một số bước sau:
3.1 – Công tác chuẩn bị
Công tác chuẩn bị là rất quan trọng để công việc được diễn ra an toàn, đảm bảo độ chính xác của thành quả theo yêu cầu. Trong bước này cần xác định phạm vi ranh giới bay chụp, thiết kế sơ bộ bay chụp như: ước tính độ cao bay chụp (độ phân giải ảnh chụp), số ca bay, số ảnh (chuẩn bị thiết bị lưu trữ), dự tính nơi cất hạ cánh… các vấn đề về thiết bị bay như pin sạc, xin cấp phép bay chụp. Chuẩn bị thiết bị thu GNSS để làm trạm cơ sở và đo các điểm kiểm tra, lưu ý cài đặt tần số thu dữ liệu đạt 5Hz để đáp ứng yêu cầu giải tọa độ tâm chụp PPK.
3.2 – Các công việc chủ yếu trên thiết bị bay không người lái
Thiết bị bay không người lái để hoạt động an toàn, hiệu quả cần chú ý đến những khuyến cáo, hướng dẫn cài đặt của hãng sản xuất để vận hành trơn tru. Thiết kế bay, chọn vị trí cất hạ cánh phù hợp, lắp pin đã sạc đầy, lắp thẻ nhớ… Vì tiến hành theo phương pháp định vị tâm chụp bằng PPK nên không cần kết nối thiết bị bay (điều khiển) với trạm cơ sở mà chỉ cần điều hướng bay định vị tâm chụp theo kiểu GNSS tuyệt đối. Chú ý về các điều kiện thời tiết như ánh sáng, hướng gió, tốc độ gió để đảm bảo có những sản phẩm ảnh chụp có chất lượng cao. Tiến hành bay chụp theo các ca bay, kết thúc 1 ca bay có thể trút dữ liệu chụp để đảm bảo an toàn.
Kết thúc quá trình bay dữ liệu thu về là tệp các ảnh chụp, tệp trị đo GNSS của tâm phase anten trên thiết bị bay, tệp ghi thông tin chụp ảnh gồm thời gian đánh dấu mở cửa chớp nhanh của từng tấm ảnh và 3 giá trị độ lệch tâm tức thời giữa tâm phase anten với tâm chụp của máy ảnh được đo tính từ bộ cảm biến quán tính tức thời IMU.
3.3 – Các công việc tại trạm cơ sở
Việc sử dụng thiết bị thu GNSS của bên thứ 3 làm trạm cơ sở cần chú ý như: đo truyền tọa độ về trạm cơ sở (nếu điểm cơ sở chưa xác định tọa độ), bật ghi dữ liệu đo tĩnh đồng bộ thời gian với thời gian chụp ảnh, chuyển đổi định dạng dữ liệu đo về dạng Rinex, chuyển đổi tọa độ trạm cơ sở về hệ tọa độ quốc tế WGS 84 ở dạng kinh độ, vĩ độ, cao độ trắc địa. Trước khi bay chụp nên đánh dấu một số điểm kiểm tra và đo truyền tọa độ đến các điểm này để làm cơ sở đánh giá độ chính xác của sản phẩm cuối cùng.
3.4 – Dữ liệu dùng để xử lý tọa độ tâm chụp
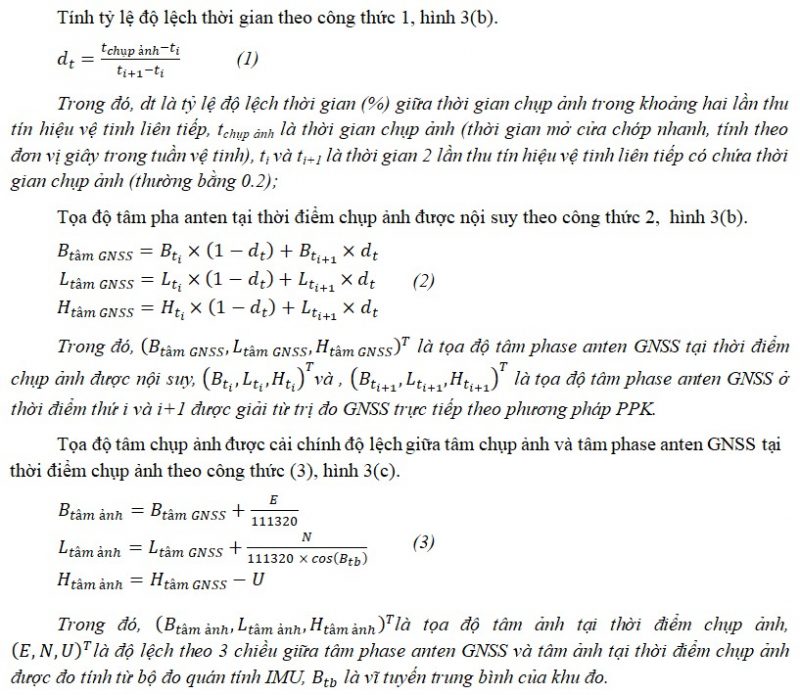
Dữ liệu dùng để xử lý tọa độ tâm chụp bao gồm: dữ liệu thu tĩnh từ trạm cơ sở (Rinex và thông tin về lịch vệ tinh), dữ liệu đo GNSS của tâm phase anten trên UAV, dữ liệu về thời gian mở cửa chớp nhanh máy chụp ảnh (thời gian chụp ảnh của từng tấm ảnh) đồng bộ với dữ liệu đo độ lệch tâm phase anten GNSS với tâm chụp ảnh từ IMU tính toán. Để tính ra tọa độ của tâm phase anten trên UAV, tác giả dùng phần mềm mã nguồn mở RTKLIB (Tomoji Takasu and support, 2013); tính toán ra tâm chụp ảnh sử dụng các công thức (1,2,3) dưới đây dưới sự trợ giúp của tệp xử lý trên excel (Aerotas, 2018).
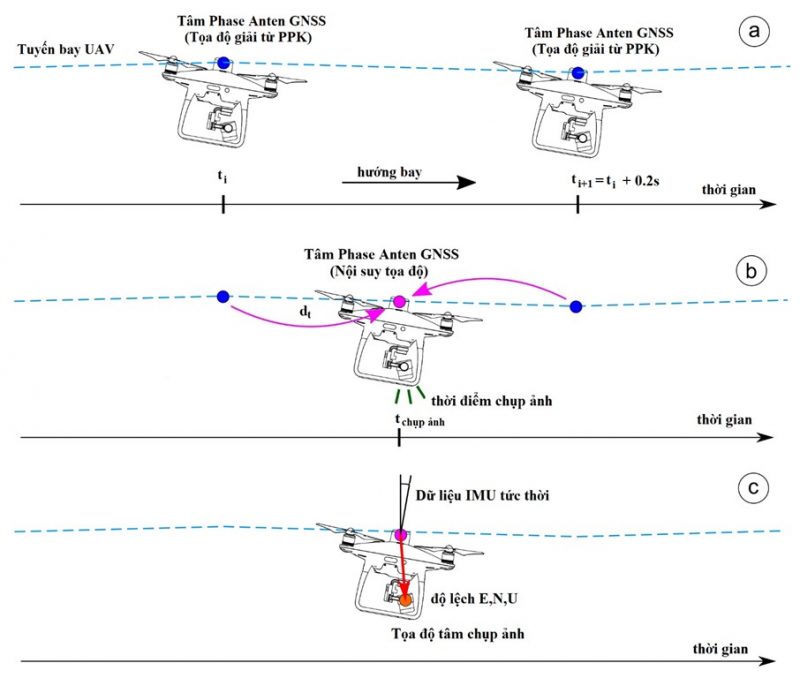
Hình 3. Tính toán tọa độ tâm chụp ảnh (Nguồn: Taddia Y., Stecchi F., Pellegrinelli A. 2020)
3.5 – Công tác xử lý đo ảnh
Công tác xử lý đo ảnh được tiến hành trên phần mềm Agisoft Metashape (Agisoft LLC, 2018); Sau khi nhập ảnh của các tuyến bay vào phần mềm, cần nhập thêm tệp tọa độ tâm chụp tương ứng, lưu ý về khai báo độ chính xác tiên nghiệm của tâm chụp giải được. Có thể nhập các điểm khống chế mặt đất để kiểm tra độ chính xác. Các bước xử lý tiếp theo gồm: liên kết, bình sai khối ảnh ở bước này cần kiểm soát độ chính xác, xây dựng đám mây điểm, xây dựng mô hình số bề mặt, tạo ảnh trực giao… Tùy theo yêu cầu của sản phẩm có thể tạo thêm mô hình 3D Mesh, Texture.
3.6 – Kiểm soát độ chính xác
Quá trình đánh giá độ chính xác của phương pháp định vị PPK cho tâm chụp ảnh nên được tiến hành ở 3 công đoạn. Thứ nhất: đánh giá chất lượng của tọa độ tâm phase anten GNSS trên UAV thông qua quá trình tính toán PPK; thứ hai: đánh giá chất lượng bình sai khối ảnh sử dụng tọa độ tâm chụp xác định từ phương pháp PPK; cuối cùng: đánh giá độ chính xác trên cơ sở độ lệch tọa độ của các điểm kiểm tra đo bằng ảnh và đo trên thực địa.
Đánh giá chất lượng của tọa độ tâm phase anten GNSS trên UAV dựa trên kết quả tính toán PPK, thông thường dựa vào chỉ số ratio (lấy giá trị ≥1.0) và lời giải Fixed được chấp nhận, cũng có thể tham khảo thêm về sai số trung phương của tọa độ tâm phase anten GNSS được trả về. Thực chất số lượng trị đo tâm phase anten GNSS (0.2s/tâm phase) là rất lớn so với tọa độ tâm chụp ảnh, nên chỉ cần chú ý về độ chính xác của các tâm phase anten tham gia trực tiếp vào nội suy tọa độ tâm chụp ảnh.
(Trích nguồn: Trần Trung Anh (2020). phương pháp định vị động xử lý sau xác định tọa độ tâm chụp cho máy bay không người lái).
Link download bản gốc: Click tại đây
Máy Gnss Rtk
SDE-28S+
Máy Gnss Rtk
Ruide R93i
Máy Gnss Rtk
SL20
Máy Gnss Rtk
Galaxy G6
Máy Gnss Rtk
K98 mini
Máy Gnss Rtk
Galaxy G1
Máy toàn đạc điện tử
NTS 332R10M
Máy Gnss Rtk
Galaxy G1 New